FANUC Series 30i/31i/32i-A, 31i-A5 TWIN-TABLE CONTROL Additional Manual Page 18
Additional Manual
EDT
App
rvPersn
DATE
DESIG.
DESCRIPTION
Date
FANUC Series 30i/31i/32i-A, 31i-A5
TWIN-TABLE CONTROL
A-90176EN
17/21
Name No.
Page
FANUC LTD.
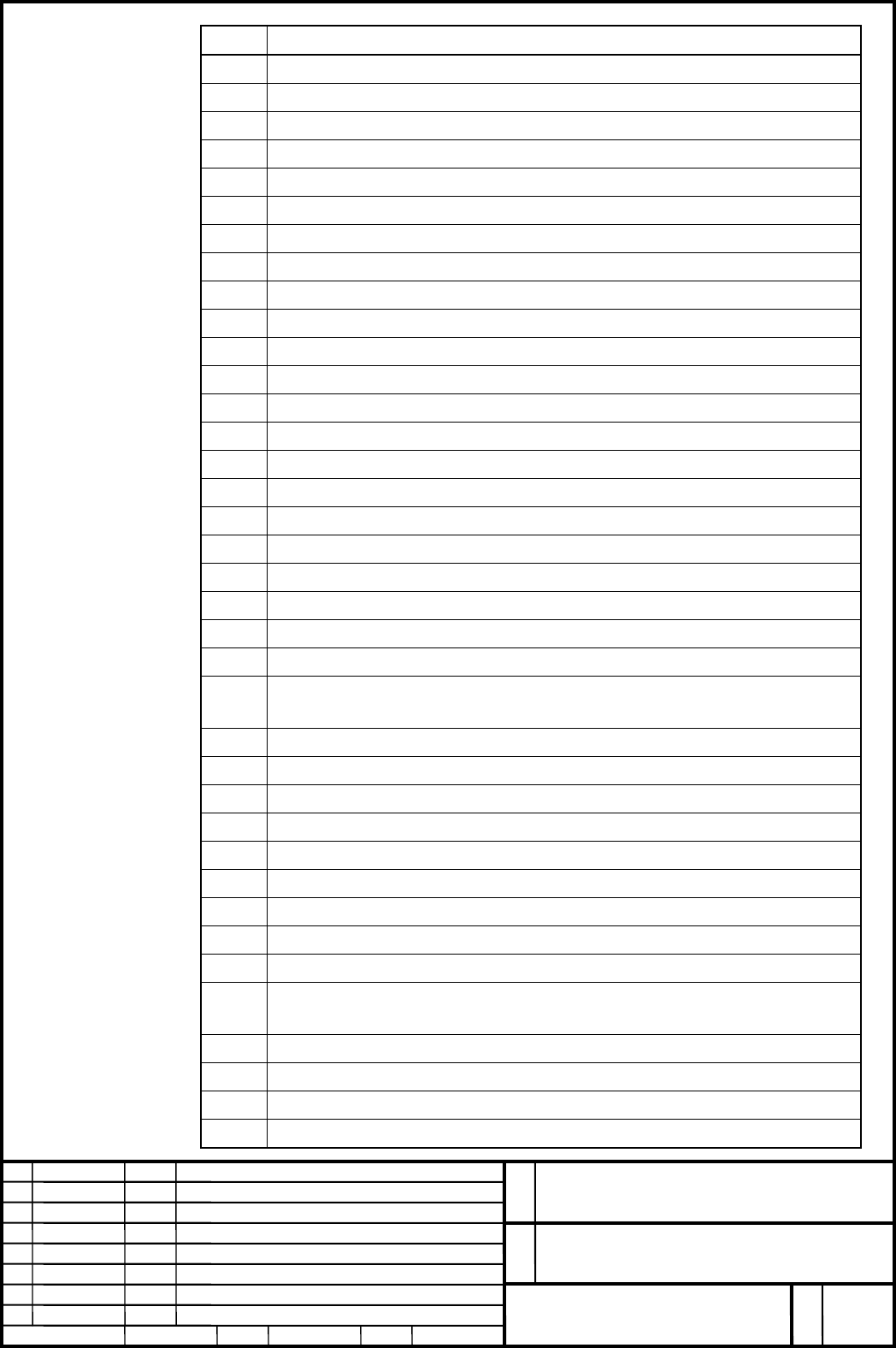
Number Description
1241 Coordinate value of the second reference position in the machine coordinate system
1242 Coordinate value of the third reference position in the machine coordinate system
1243 Coordinate value of the fourth reference position in the machine coordinate system
1260 Amount of a shift per one rotation of a rotation axis
1310#0 Enabling stored stroke check 2
1320 Coordinate value I of stored stroke check 1 in the positive direction on each axis
1321 Coordinate value I of stored stroke check 1 in the negative direction on each axis
1322 Coordinate value I of stored stroke check 2 in the positive direction on each axis
1323 Coordinate value I of stored stroke check 3 in the negative direction on each axis
1324 Coordinate value I of stored stroke check 3 in the positive direction on each axis
1325 Coordinate value I of stored stroke check 2 in the negative direction on each axis
1326 Coordinate value II of stored stroke check 1 in the negative direction on each axis
1327 Coordinate value II of stored stroke check 1 in the negative direction on each axis
1420 Rapid traverse rate for each axis
1421 F0 rate of rapid traverse override for each axis
1423 Feedrate in manual continuous feed (jog feed) for each axis
1425 FL rate of the reference position return for each axis
1427 External deceleration rate of rapid traverse for each axis
1430 Maximum cutting feedrate for each axis
1600#4 Using exponential acceleration/deceleration in jog feed
1610#1 Using exponential acceleration/deceleration in cutting feed and dry run
1620 Time constant used for linear acceleration/deceleration for each axis
1621 Time constant T2 used for bell-shaped acceleration/deceleration in rapid traverse for
each axis
1622 Time constant of acceleration/deceleration in cutting feed for each axis
1623 FL rate of acceleration/deceleration in cutting feed for each axis
1624 Time constant of acceleration/deceleration in jog feed for each axis
1625 FL rate of exponential acceleration/deceleration in jog feed for each axis
1815#2 Using a linear scale having reference marks
1882 Intervals of mark 2 of the linear scale with absolute addressing reference marks
1885 Maximum allowable value for total travel during torque control
1886 Positional deviation when torque control is canceled
2031 Torque-command-difference threshold for a torque-difference alarm
3471 Allowable difference between the specified end position and the end position obtained
from the increase/decrease and frequency in spiral interpolation or conic interpolation
3605#0 Using bidirectional pitch error compensation
3605#1 Using interpolation type pitch error compensation
3624 Interval between pitch error compensation positions for each axis
3625 Travel distance per revolution in pitch error compensation of rotation axis type
Contents Summary of FANUC Series 30i/31i/32i-A, 31i-A5 TWIN-TABLE CONTROL Additional Manual
- Page 1TECHNICAL REPORT (MANUAL) NO. TMN05/109E Date , Oct., 2005 General Manager of Software Research Laboratory FANUC Series 30i/31i/32i-A, 31i-A5 TWIN-TABLE CONTROL 1. Communicate this report to : O Your information O GE Fanuc-A, GE Fanuc-E FANUC Robotics MILACRON O Machine tool builder Sales agency End
- Page 2FANUC Series 30i/31i/32i-A, 31i-A5 TWIN-TABLE CONTROL SPECIFICATIONS Notice All specifications are subject to change without notice. Matters which are not especially described as possible in this document should be regarded as “impossible”. © FANUC LTD 2005 Name FANUC Series 30i/31i/32i-A, 31i-A5 TW
- Page 3TABLE OF CONTENTS 1 TWIN-TABLE CONTROL 4 1.1 Overview 4 1.2 Components of axes 5 1.3 Operation mode 6 1.4 Relation with other functions 8 1.5 Signal 10 1.6 Parameter 14 1.7 Alarm and message 20 2 Differences from the Series 16i 21 Name FANUC Series 30i/31i/32i-A, 31i-A5 TWIN-TABLE CONTROL No. A-9017
- Page 4This manual includes safety precautions for protecting the user and preventing damage to the machine. Precautions are classified into Warning and Caution according to their bearing on safety. Also, supplementary information is described as a Note. Read the Warning, Caution, and Note thoroughly befor
- Page 51 TWIN-TABLE CONTROL 1.1 Overview In twin-table control, synchronization operation, single operation, and normal operation can be switched for two or more specified axes by a signal input from the machine side. The following operations can be performed for a machine tool having two tables, each of w
- Page 61.2 Components of axes In synchronization operation, an axis for which a move command can be issued is called the master axis, and an axis for which movement is performed in synchronization with that for the master axis is called a slave axis. By setting the axis number of a master axis in the param
- Page 71.3 Operation mode Synchronization operation mode Use this operation for situations such as when a large workpiece placed over the two tables is machined. According to a move command issued to master axis, slave axis can be operated in synchronization. This operation is possible with automatic opera
- Page 8Selecting the operation The selection signals SYNMx/SYNCx, SYNMJx/SYNCJx are used to change each operation mode. The selection signals SYNMx/SYNCx, SYNMJx/SYNCJx can be switched from the PMC side by the use of an M function of a program command. In this case, specify an M code to be used in paramete
- Page 91.4 Relation with other functions Tandem control Tandem control can be applied to both the master axis and slave axis. The same axis arrangement restriction as that for normal tandem control is applicable. There is no restriction specific to this function. Pitch error compensation / Backlash compens
- Page 10Manual handle interrupt The manual handle interrupt for normal operation. Manual reference position return In synchronization operation, the movement for the master axis is also applied to the slave axis for manual reference position return. In principle, manual reference position return for normal
- Page 111.5 Signal Twin-table control master axis selection signal for automatic operation SYNM1~SYNM8
[Classification] Input signal [Function] Master axis for twin-table control is selected during automatic operation. This signal is provided for each controlled axis. The number at the end of the sig - Page 12Twin-table control master axis selection signal for manual operation SYNMJ1~SYNMJ8
[Classification] Input signal [Function] Master axis for twin-table control is selected during manual operation. This signal is provided for each controlled axis. The number at the end of the signal name repres - Page 13Signal addresses #7 #6 #5 #4 #3 #2 #1 #0 Gn138 SYNC8 SYNC7 SYNC6 SYNC5 SYNC4 SYNC3 SYNC2 SYNC1 Gn140 SYNCJ8 SYNCJ7 SYNCJ6 SYNCJ5 SYNCJ4 SYNCJ3 SYNCJ2 SYNCJ1 Gn541 SYNM8 SYNM7 SYNM6 SYNM5 SYNM4 SYNM3 SYNM2 SYNM1 Gn542 SYNMJ8 SYNMJ7 SYNMJ6 SYNMJ5 SYNMJ4 SYNMJ3 SYNMJ2 SYNMJ1 How signals for each axis a
- Page 14・ Output signals address bit Symbol Signal name Master and Master slave axes axis only F094 0 ZPx Reference position return end signal ○ F096 0 ZP2x 2nd reference position return completion ○ signals F098 0 ZP3x 3rd reference position return completion ○ signals F100 0 ZP4x 4th reference position re
- Page 151.6 Parameter 8311 Axis number of master axis in feed axis synchronous control or twin table comtrol NOTE When this parameter is set, the power must be turned off before operation is continued. [Input type] Parameter input [Data type] Byte axis [Valid data range] 0 to Number of controlled axes Selec
- Page 168337 M code for turning off synchronization in feed axis synchronous control or twin table control [Input type] Parameter input [Data type] 2-word path [Valid data range] 1 to 999999999 This parameter specifies an M code for switching from synchronous operation to normal operation. The M code set in
- Page 17Notes on setting parameters for each axis Parameters to be set for each axis can be divided into the following three types when they are set for an axis under twin-table control: 1) Parameter which must be set to the same value for the master and slave axes 2) Parameter which may be set to different
- Page 18Number Description 1241 Coordinate value of the second reference position in the machine coordinate system 1242 Coordinate value of the third reference position in the machine coordinate system 1243 Coordinate value of the fourth reference position in the machine coordinate system 1260 Amount of a s
- Page 19Number Description 5401#0 Enabling scaling 5022 Distance (L) from reference tool tip position to the reference measurement surface 5421 Scaling magnification for each axis 5440 Positioning direction and overrun distance in single directional positioning 7310 Ordinal number of an axis along which a m
- Page 20Number Description 3622 Number of the pitch error compensation position at extremely positive position for each axis 3623 Magnification for pitch error compensation for each axis 3626 Number of the both-direction pitch error compensation position at extremely negative position (for movement in the n
- Page 211.7 Alarm and message Number Message Description PS0009 IMPROPER NC-ADDRESS In twin-table control, the following errors occurred during synchronization operation or slave axis single operation. 1) The program issued the move command to the slave axis. Name FANUC Series 30i/31i/32i-A, 31i-A5 TWIN-TAB
- Page 222 Differences from the Series 16i - It is only machining system that is able to use the twin-table control in Series 16i. However, this function can be used by both machining system and lathe system in Series 30i/31i/31i-A/32i. ・ The signal’s name and address are changed. Sereis 16i Sereis 30i/31i/3