Spindle alpha i Startup Manual Additional Manual Page 29
Additional Manual
2
01.05.24
29/41
Descri
p
tion
Design.
DateEd
01.03.23
SHEET
DRAW. No.
CUST.
TITLE
Y
okota
Y
okota
Newly designed
α
i series Spindle
Start-up Procedure
A
-53866E-387/02
FANUC LTD
1
FS0 FS15 Application
1st
spindle
2nd
spindle
1st
spindle
2nd
spindle
FS15i
FS16i
/16
Standard
Initial
Setting
data
Contents
MAIN
high
speed
MAIN
low
speed
SUB
high
speed
SUB
low
speed
Class-
Ificati-
on
Internal
data
number
F-xxx
6631 6771 3131 3271 3131 4131 0 Time constant for velocity
detecting filter (for Cs
contouring)
Ο Ο
B 121
6632 6772 3132 3272 3132 4132 0 Current conversion constant
for V phase
Ο
C 122
6633 6773 3133 3273 3133 4133 Depends
on the
model
Motor model code
Ο Ο
C 123
6634 6774 3134 3274 3134 4134 Depends
on the
model
Detected level for motor
overheat
Ο Ο
C 124,125
6635 6775 3135 3275 3135 4135 0 Grid shift for Cs contouring
control mode
Ο Ο
B 126,127
6900 6940 3280 3500 3136 4136 Depends
on the
model
Motor voltage during
Normalrotation
Ο
B 128
6901 6941 3281 3501 3137 4137 Depends
on the
model
Motor voltage in servo
mode/during synchronization
control
Ο
B 129
6902 6942 3282 3502 3138 4138 Depends
on the
model
Base speed of motor output
Specification
Ο
C 130
6903 6943 3283 3503 3139 4139 Depends
on the
model
Output limit for motor output
Specifications
Ο
C 131
6904 6944 3284 3504 3140 4140 Depends
on the
model
Activating voltage saturation
speed at no load
Ο
C 132
6905 6945 3285 3505 3141 4141 Depends
on the
model
Base speed limit ratio
Ο
C 133
6906 6946 3286 3506 3142 4142 Depends
on the
model
Proportional gain of current
Loop
Ο
C 134
6907 6947 3287 3507 3143 4143 Depends
on the
model
Integral gain of current
Loop
Ο
C 135
6908 6948 3288 3508 3144 4144 Depends
on the
model
Velocity at which current loop
integral gain is zero
Ο
C 136
6909 6949 3289 3509 3145 4145 Depends
on the
model
Filter time constant for
Processing saturation related
to the voltage command
Ο
C 137
6910 6950 3290 3510 3146 4146 Depends
on the
model
Current conversion constant
Ο
C 138
6911 6951 3291 3511 3147 4147 Depends
on the
model
Secondary current coefficient
Ο
C 139
6912 6952 3292 3512 3148 4148 Depends
on the
model
Criterion level for saturation
related to the voltage
command/PWM command
clamp value
Ο
C 140
6913 6953 3293 3513 3149 4149 Depends
on the
model
Slip constant
Ο
C 141
6914 6954 3294 3514 3150 4150 Depends
on the
model
Slip compensation coefficient
for a high-speed zone/slip
compensation coefficient for
deceleration
Ο
C 142
6915 6955 3295 3515 3151 4151 Depends
on the
model
PWM command clamp value
for deceleration
Ο
C 143
6916 6956 3296 3516 3152 4152 Depends
on the
model
Motor leakage constant
Ο
C 144
Contents Summary of Spindle alpha i Startup Manual Additional Manual
- Page 1αi series Spindle Start-up Procedure Table of contents 1. Overview 2 2. Start-up procedure 3 3. Setting parameters to start-up 4 4. Parameters related to detectors 6 5. Parameters related to normal operation mode 18 6. Spindle parameter table 19 7. Trobleshooting 31 TITLE αi series Spindle Start-up
- Page 21. Overview This manual mainly describes the spindle parameters when you use αi series spindle amplifiers and start-up the spindle. In αi series spindle, please attention that parameter specifications related to detectors are different from α series. Parameters and adjustment method are the same as
- Page 32. Start-up Procedure A. Ch eck t h e spin dle-r ela t ed specifica t ions. 1. CNC m odel (αi ser ies ser vo a m plifier syst em is con n ect ed t o i ser ies CNC.) 2. Spin dle m ot or 3. P ower su pply m odu le 4. Spin dle a m plifier m odule 5. Det ect or syst em B. Ch eck a ll con n ect ion s. C.
- Page 43. Setting parameters to start-up 3.1 Parameters for the αi series (Serial) spindle system. Parameter No. 0 15 Description 1st 2nd 1st 2nd 15i 16i/16 spindle spindle spindle spindle - - 5606 5606 5606 - Whether to use αi series (Serial) (*1) (*1) #0 #1 #0 (*1) spindle amplifier 0071 5604 5841 3701 N
- Page 5Parameter No. 0 15 Setting 1st 2nd 1st 2nd 15i 16i/16 spindle spindle spindle spindle 6633 6773 3133 3273 3133 4133 Model code 2. Set the relevant parameter to 1 to enable automatic spindle parameter initialization. Parameter No. 0 15 Setting 1st 2nd 1st 2nd 15i 16i/16 spindle spindle spindle spindl
- Page 63.3 Parameters related to spindle speed commands Parameter No. Description 0T 0M 15 15i 16i/16 0013 - - 3706 Spindle speed command polarity #7,6 #7,6 (enabled when input signal SSIN is set to 0) - 0543 5618 3735 Minimum clamp speed of spindle motor (*1) (M system) - 0542 5619 3736 Maxmum clamp speed
- Page 74.1 List of parameter for detector Parameter No. Description 0T 0M 15 15i 16i/16 6500 #0 3000 #0 3000 #0 4000 #0 Direction of spindle and spindle motor rotation 6501 #4 3001 #4 3001 #4 4001 #4 Spindle sensor mounting direction 6502 3002 3002 4002 Setting of spindle sensor type #3,2,1,0 #3,2,1,0 #3,2
- Page 84.2 Detail of parameter for detector 0 15 15i 16i/16 1st 6500 3000 3000 4000 ROTA1 2nd 6640 3140 #7 #6 #5 #4 #3 #2 #1 #0 ROTA1 Relationship between the rotation directions of spindle and sipndle motor. 0 : Spindle and spindle motor rotate in the same direction. 1 : Spindle and spindle motor rotate i
- Page 9Number of teeth of PCPL2 PCPL1 PCPL0 PCTYPE spindle sensor 0 0 0 0 256λ/rev 0 0 0 1 128λ/rev 0 1 0 0 512λ/rev 0 1 0 1 64λ/rev 1 0 0 1 1024λ/rev 1 1 0 0 384λ/rev 0 15 15i 16i/16 1st 6504 3004 3004 4004 RFTYPE EXTRF 2nd 6644 3144 #7 #6 #5 #4 #3 #2 #1 #0 EXTRF、RFTYPE Setting of a reference switch signa
- Page 100 15 15i 16i/16 1st 6510 3010 3010 4010 MSTYP2 MSTYP1 MSTYP0 2nd 6650 3150 #7 #6 #5 #4 #3 #2 #1 #0 MSTYP2、MSTYP1、MSTYP0 Motor sensor type Set detectors installed in motor. (including detector of built-in motor) MSTYP2 MSTYP1 MSTYP0 Motor sensor type 0 0 0 Mi sensor 0 0 1 MZi、BZi sensor 0 15 15i 16i/
- Page 11This bit is set to 1, AL-81, AL-82, AL-85, AL-86 are checked. RFCHK2 Specifies whether to detect alarm related to position feedback signal for thread cutting (AL-46) 0 : Alarm detection disabled. 1 : Alarm detection enabled. RFCHK3 Function for redetecting the one rotation signal each time position
- Page 120 15 15i 16i/16 1st 6935 3315 3171 4171 Denominator of arbitrary gear ratio between motor sensor and spindle (HIGH) CTH1A=0 2nd 6975 3535 0 15 15i 16i/16 1st 6936 3316 3172 4172 Numerator of arbitrary gear ratio between motor sensor and spindle (HIGH) CTH1A=0 2nd 6976 3536 0 15 15i 16i/16 1st 6937 3
- Page 13(a) In case of using α position coder [Example system configuration] M i (or MZi sen sor ) in spin dle m ot or J YA2 Spin dle α posit ion coder SP M TYP E A J YA3 Dir ect con n ect ion , 1:1 con n ect ion by gea r or t im in g belt Parameter No. Setting Description 4000 #0 Depends on Direction of sp
- Page 14(B) In case of using α position coder S [Example system configuration] M i (or MZi sen sor ) in spin dle m otor J YA2 Spin dle α posit ion coder S SP M TYP E B J YA4 Dir ect con n ect ion , 1:1 con nect ion by gea r or t im in g belt Parameter No. Setting Description 4000 #0 Depends on Direction of
- Page 15[Example system configuration 2] BZi sensor Spin dle+ Spin dle m ot or J YA2 SP M TYP E A [Example system configuration 3] MZi sen sor in spin dle m ot or J YA2 Spin dle SP M TYP E A Dir ect con n ect ion , 1:1 con n ect ion by gea e or t im in g belt Parameter No. Setting Description 4000 #0 0 Dire
- Page 16(d) In case of using separate BZi sensor [Example system configuration] M i (or MZi sen sor ) in spin dle m ot or J YA2 Spin dle SP M TYP E B J YA4 BZi sen sor Parameter No. Setting Description 4000 #0 Depends on Direction of spindle and spindle motor rotation the configuration 4001 #4 Depends on Sp
- Page 17(e) In case of using a reference switch signal (proximity switch) [Example system configuration] M i sen sor (or MZi sen sor ) in spin dle m ot or Spin dle J YA2 SP M Refer en ce swit ch signa l TYP E A (P r oxim it y swit ch ) Gea r or t im in g belt J YA3 Parameter No. Setting Description 4000 #0
- Page 185. Parameters related to normal operation mode 5.1 List of parameters related to normal operation mode Parameter No. 0 15 16i Description 15i 1st 2nd 1st 2nd 16 6540 6680 3040 3180 3040 4040 Velocity loop proportional gain for normal operation (HIGH) CTH1A=0 6541 6681 3041 3181 3041 4041 Velocity lo
- Page 190 15 15i 16i/16 1st 6549 3049 3049 4049 Velocity loop integral gain for normal operation (LOW) CTH1A=1 2nd 6689 3189 Data unit : Data range : 0 to 32767 Standard setting : 10 This data is used to set the velocity loop integral gain for normal operation. A parameter is selected with the CTH1A input s
- Page 20FS0 FS15 Standard Application Internal Class- FS16i Initial MAIN MAIN SUB SUB data 1 st 2 nd 1 st 2 nd FS15i Contents Ificati- /16 Setting high low high low number Spindle Spindle Spindle Spindle on data speed speed speed speed F-xxx 6500#0 6640#0 3000#0 3140#0 3000#0 4000#0 0 Spindle and motor rota
- Page 21FS0 FS15 Standard Application Internal Class- FS16i Initial MAIN MAIN SUB SUB data 1st 2nd 1st 2nd FS15i Contents Ificati- /16 Setting high low high low number spindle spindle spindle spindle on data speed speed speed speed F-xxx 6506#0 6646#0 3006#0 3146#0 3006#0 4006#0 0 003#8 #1 #1 #1 #1 #1 #1 0
- Page 22FS0 FS15 Standard Application Internal Class- FS16i Initial MAIN MAIN SUB SUB data 1st 2nd 1st 2nd FS15i Contents Ificati- /16 Setting high low high low number spindle spindle spindle spindle on data speed speed speed speed F-xxx 6512 6652 3012 3152 3012 4012 Depends Setting of PWM carrier frequency
- Page 23FS0 FS15 Standard Application Internal Class- FS16i Initial MAIN MAIN SUB SUB Ificati- data 1st 2nd 1st 2nd FS15i Contents /16 Setting high low high low number spindle spindle spindle spindle on data speed speed speed speed F-xxx 6518#0 6658#0 3018#0 3158#0 3018#0 4018#0 0 009#8 #1 #1 #1 #1 #1 #1 0
- Page 24FS0 FS15 Standard Application Internal Class- FS16i Initial MAIN MAIN SUB SUB data 1st 2nd 1st 2nd FS15i Contents Ificati- /16 Setting high low high low number spindle spindle spindle spindle on data speed speed speed speed F-xxx 6520 6660 3020 3160 3020 4020 Depends Maximum motor speed Ο Ο C 010 on
- Page 25FS0 FS15 Standard Application Internal Class- FS16i Initial MAIN MAIN SUB SUB data 1st 2nd 1st 2nd FS15i Contents Ificati- /16 Setting high low high low number spindle spindle spindle spindle on data speed speed speed speed F-xxx 6552 6692 3052 3192 3052 4052 10 Integral gain for velocity loop Ο Ο B
- Page 266578 6718 3078 3218 3078 4078 200 068 6579 6719 3079 3219 3079 4079 0 069 6580 6720 3080 3220 3080 4080 Depends Regenerative power limit for Ο C 070 on the high-speed zone/regenerative model power limit 6581 6721 3081 3221 3081 4081 20 Delay time until motor power Ο Ο B 071 is cut off. TITLE αi seri
- Page 27FS0 FS15 Standard Application Internal Class- FS16i Initial MAIN MAIN SUB SUB data 1st 2nd 1st 2nd FS15i Contents Ificati- /16 Setting high low high low number spindle spindle spindle spindle on data speed speed speed speed F-xxx 6582 6722 3082 3222 3082 4082 10 Setting of acceleration/ Ο Ο B 072 de
- Page 28FS0 FS15 Standard Application Internal Class- FS16i Initial MAIN MAIN SUB SUB data 1st 2nd 1st 2nd FS15i Contents Ificati- /16 Setting high low high low number spindle spindle spindle spindle on data speed speed speed speed F-xxx 6608 6748 3108 3248 3108 4108 Depends Velocity at which the current Ο
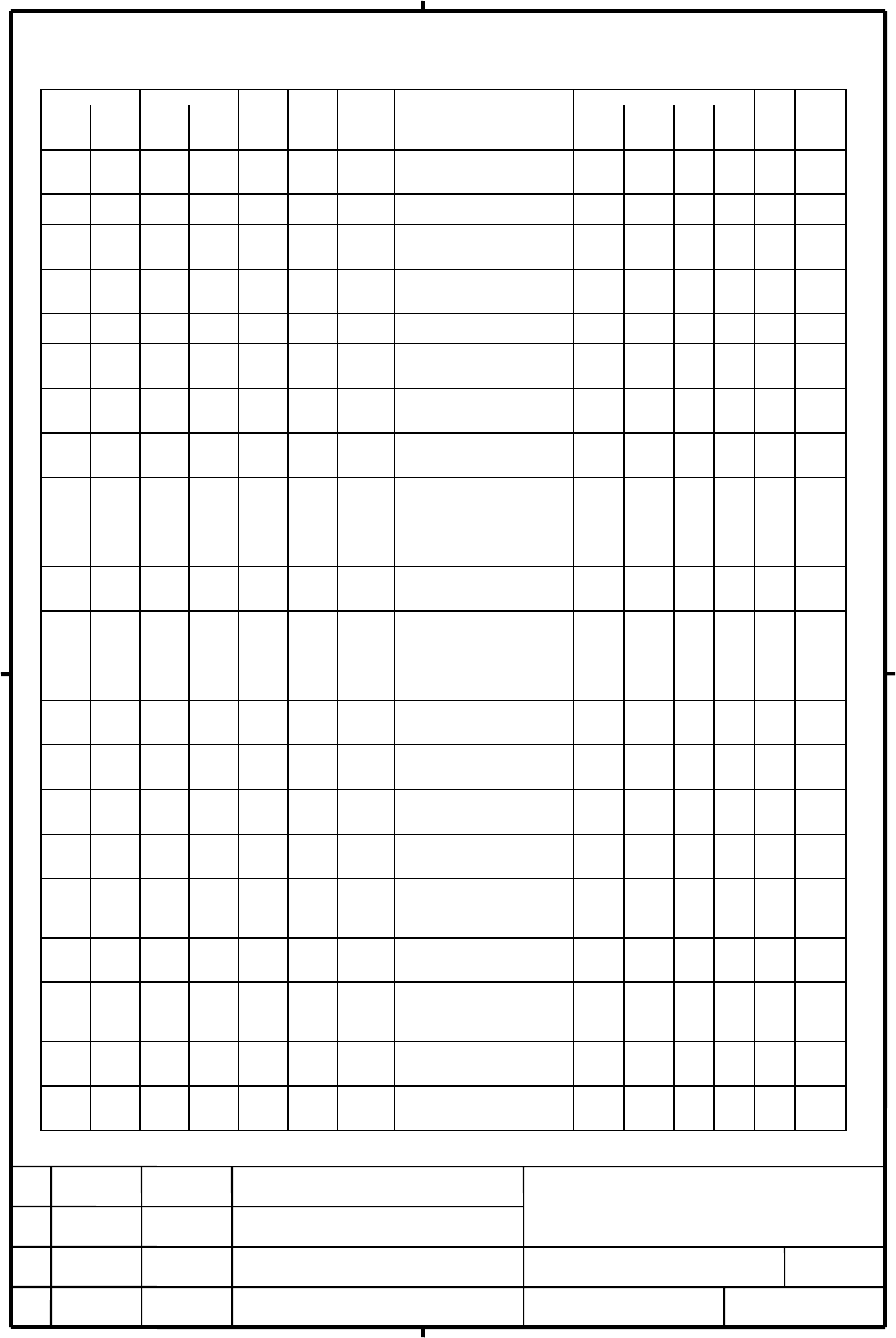
- Page 29FS0 FS15 Standard Application Internal Class- FS16i Initial MAIN MAIN SUB SUB data 1st 2nd 1st 2nd FS15i Contents Ificati- /16 Setting high low high low number spindle spindle spindle spindle on data speed speed speed speed F-xxx 6631 6771 3131 3271 3131 4131 0 Time constant for velocity Ο Ο B 121 d
- Page 30FS0 FS15 Standard Application Internal Class- FS16i Initial MAIN MAIN SUB SUB data 1st 2nd 1st 2nd FS15i Contents Ificati- /16 Setting high low high low number spindle spindle spindle spindle on data speed speed speed speed F-xxx 6917 6957 3297 3517 3153 4153 Depends Regular-time voltage Ο C 145 on
- Page 31TITLE αi series Spindle Start-up Procedure 2 01.05.24 Yokota DRAW. No. 1 01.03.23 Yokota Newly designed A-53866E-387/02 CUST. Design. SHEET Ed Date Description FANUC LTD 31/41
- Page 32FS0 FS15 Standard Application Internal Class- FS16i Initial MAIN MAIN SUB SUB data 1st 2nd 1st 2nd FS15i Contents Ificati- /16 Setting high low high low number spindle spindle spindle spindle on data speed speed speed speed F-xxx 6211 6391 3391 3611 3247 4247 0 Time constant for spindle load Ο B 229
- Page 33FS0 FS15 Standard Application Internal Class- FS16i Initial MAIN MAIN SUB SUB data 1st 2nd 1st 2nd FS15i Contents Ificati- /16 Setting high low high low number spindle spindle spindle spindle on data speed speed speed speed F-xxx 6304 6484 3484 3704 3340 4340 0 Bell-shaped Ο Ο B 324 acceleration/dec
- Page 34TITLE αi series Spindle Start-up Procedure 2 01.05.24 Yokota DRAW. No. 1 01.03.23 Yokota Newly designed A-53866E-387/02 CUST. Design. SHEET Ed Date Description FANUC LTD 34/41
- Page 35Symptom Relevant section 1 The motor does not rotate. 7.1 2 The motor does not rotate at the command speed. 7.2 3 The motor vibrates and generates noise while rotating. 7.3 4 Overshoot or hunting occurs. 7.4 5 The cutting capability is sub-standard. 7.5 6 The time required for acceleration/decelerat
- Page 367.2 When the motor does not rotate at the commanded speed (1) Check all connections. (a) Motor power line connection (b) Feedback signal cable connection (2) Check the parameter setting. (a) Parameter data for each motor model (b) Detector-related parameter (c) Setting of maximum motor speed 0 15 15
- Page 37(3) Compare the conditions when the motor is driven and when the motor is coasting. If considerably less vibration and noise is observed while the motor is coasting, the control circuitry is faulty. If the same degree of vibration and noise is observed, however, the motor or machine is faulty. The m
- Page 387.6 When time required for acceleration/deceleration increases (1) Check the parameter setting (a) Parameter data for each motor model (b) Limited output pattern and output limit 0 15 15i 16i/16 Description 6528 3028 3028 4028 Sets a limited output pattern. 6529 3029 3029 4029 Output limit (c) Regen
- Page 39Status error Action Indica tion 01 SFR (normal rotation command), SRV (reverse rotaion Check the sequence of *ESP and MRDY. For command) or ORCM (orientation command) is entered MRDY, check bit 0 of parameter No.4001, when *ESP (emergency stop signal, which Specifying whether to use the MRDY signal.
- Page 40Status error Action Indica tion 11 When the servo mode control command (rigid tapping, When a servo mode is specified, do not specify spindle positioning, etc) is active, and another mode another mode. To enter another mode, first (such as Cs contouring control, spindle synchronization cancel the se
- Page 417.8 Alarms Table CNC monitor display SPM Display Troubleshooting Alarm Description 0 15 15i 16i/16 (alarm (Described parameter is No.16i/16’) code) 409 OT301 SP0001 7n01 01 Motor overheat 1. Reconsider circumstances temperature and load condition (cutting condition and acceleration/ deceleration fre
- Page 42CNC monitor display SPM Display Troubleshooting Alarm description 0 15 15i 16i/16 (alarm (Described parameter No. is 16i/16’) code) 408 OT300 SP098x 750 19 Excessive offset of phase Change SPM. U current detection circuit 408 OT300 SP098x 750 20 Excessive offset of phase Change SPM. V current detect
- Page 43CNC monitor display SPM Display Troubleshooting Alarm description 0 15 15i 16i/16 (alarm (Described parameter No.16i/16) code) 409 OT399 SP0046 7n46 46 One-rotation signal 1. Check and correct parameters. detection error during 2. Change feedback cables. thread cutting 3. Change position detector. 4
- Page 44CNC monitor display SPM Display Troubleshooting Alarm description 0 15 15i 16i/16 (alarm (Described parameter No.16i/16) code) 409 OT399 SP0073 7n73 73 Motor sensor signal 1. Change feedback cables. disconnected 2. Confirm the shielding. 3. Check and correct connection. 4. Adjust sensor. 409 OT399 S